manipulator przegubowy

MANIPULATOR ROVER umożliwia podnoszenie, manipulowanie i obracanie części o wadze od 1 do 100 kg z maksymalną łatwością dzięki ergonomicznemu systemowi!
W zależności od rodzaju obsługi, manipulator łazika może być wyposażony w różne systemy chwytania, takie jak: chwytak pneumatyczny, magnes lub przyssawka próżniowa.
Podczas przenoszenia ładunek można również obrócić do żądanej pozycji przed jego umieszczeniem.
Dokumenty do pobrania
Manipulator łazika
| Kod | Nośność | Promień roboczy | Pionowy skok | System chwytania | Waga | Ciśnienie robocze | Kontrola prędkości |
| Kg | mm | mm | Kg | bar | |||
| RM01 | 1 - 100 | 1915 + głowa | 736 | magnes pneumatyczny, przyssawka lub chwytak pneumatyczny | 60 | 6 - 8 | dwukierunkowy |
| RM02 | 1 -50 | 1685 + głowa | 736 (+500 regulacja) | magnes pneumatyczny, przyssawka lub chwytak pneumatyczny | 40 | 6 - 8 | dwukierunkowy |
")
Obszar roboczy RM01
")
Obszar roboczy RM02
Typ głowicy obrotowej
SRH
Głowica z dwiema osiami obrotu
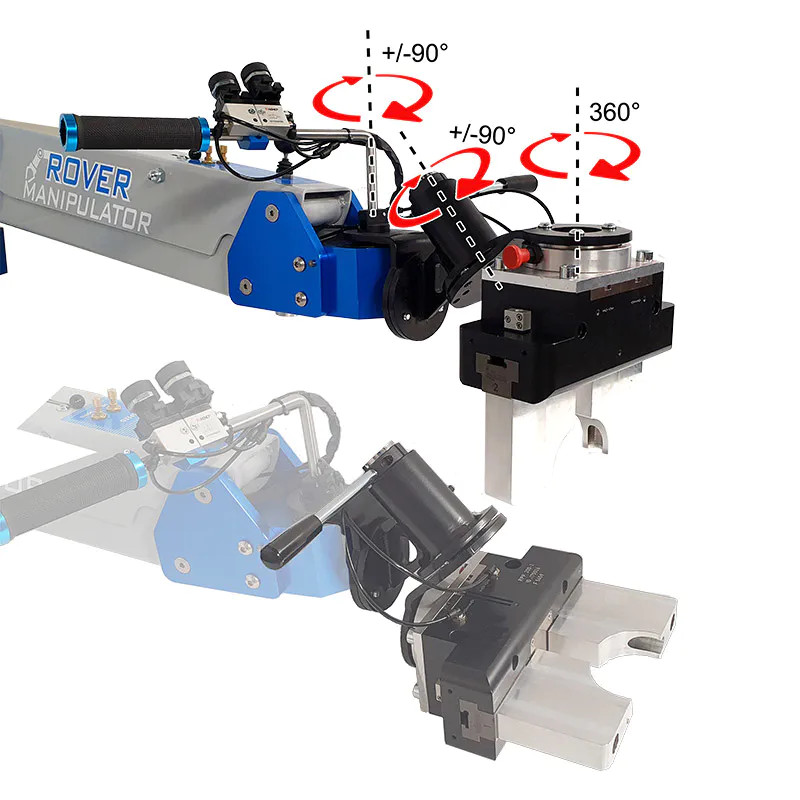
MRH
Głowica z trzema osiami obrotu.
System chwytania
Magnes pneumatyczny

Próżnia
Chwytak pneumatyczny
WIDEO
Główne cechy
Intuicyjna obsługa i niskie wymagania konserwacyjne zapewniają szybkie rozwiązanie zmniejszające fizyczne obciążenie operatora.
Manipulator można regulować w celu uzyskania żądanej prędkości. Umożliwia to delikatną i precyzyjną obsługę ładunku.